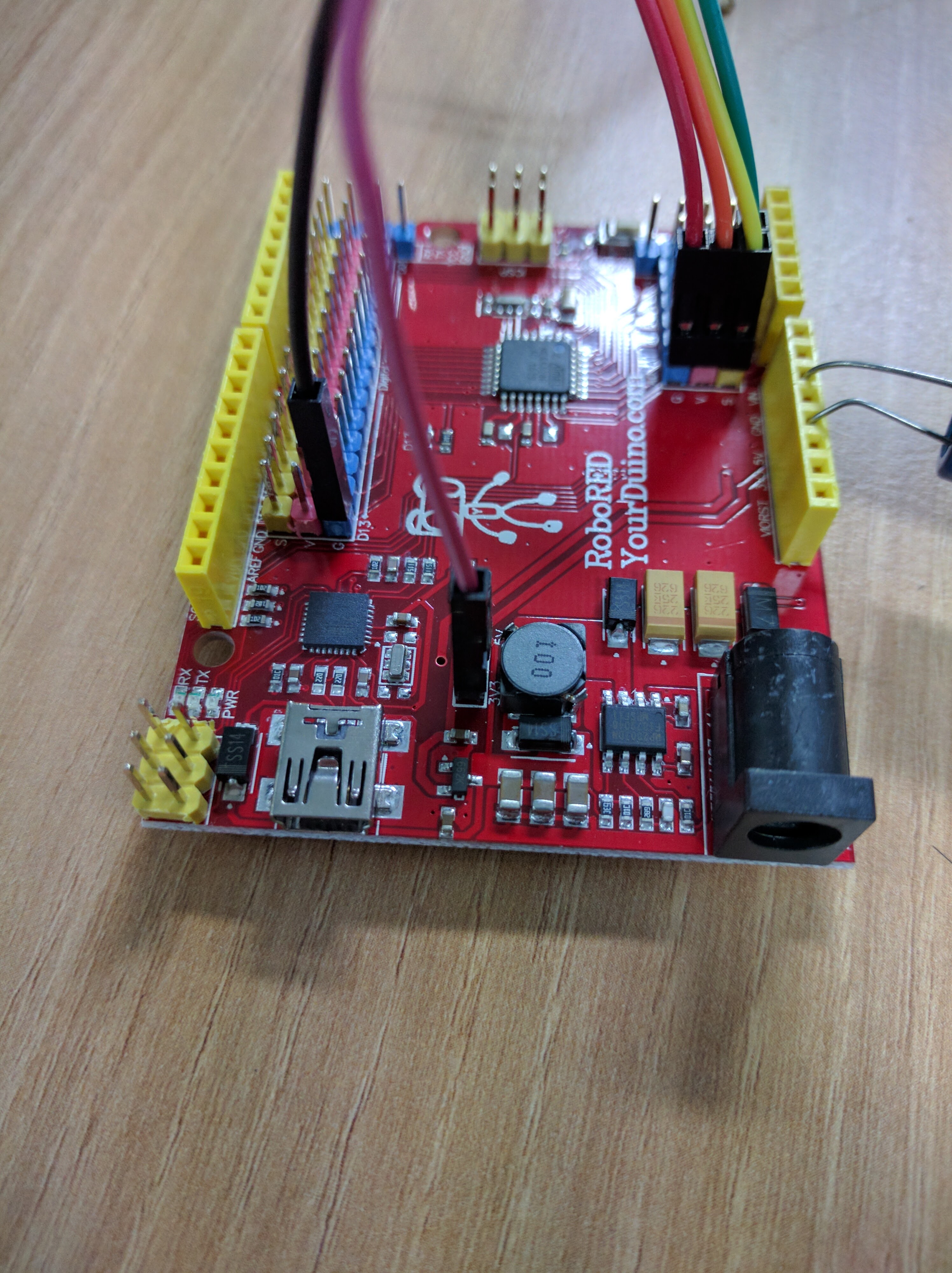
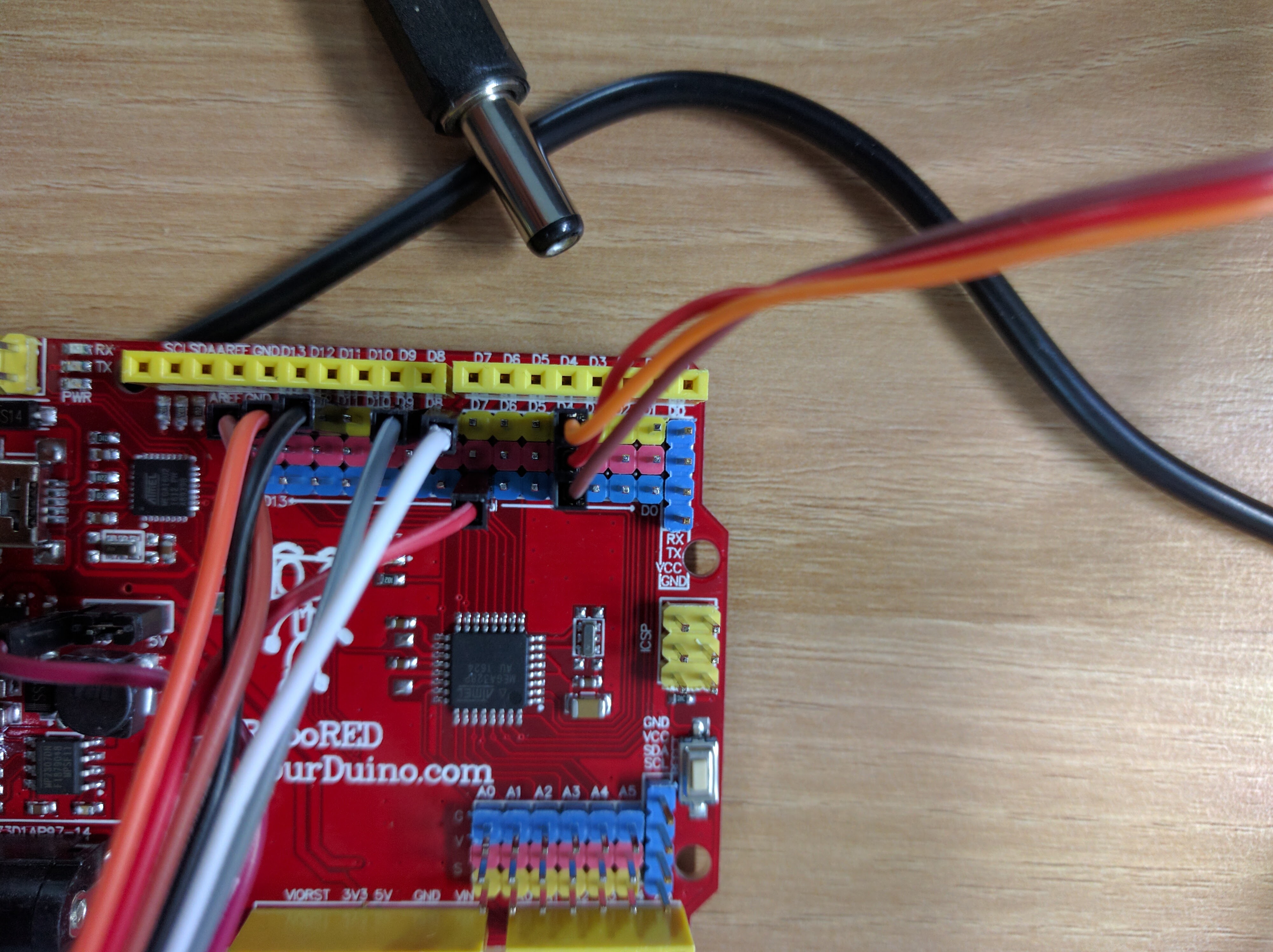
Remote Control Circuit
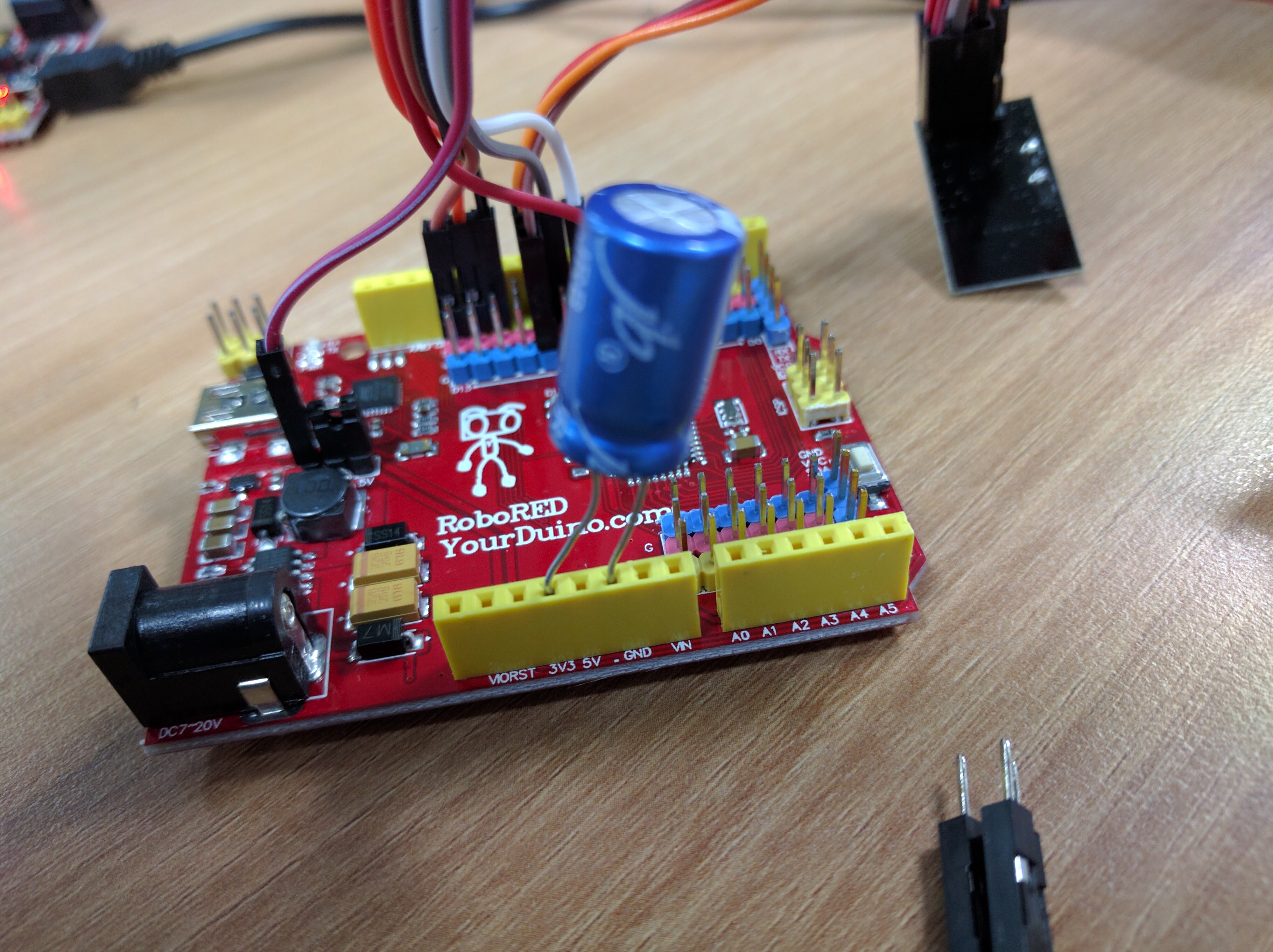
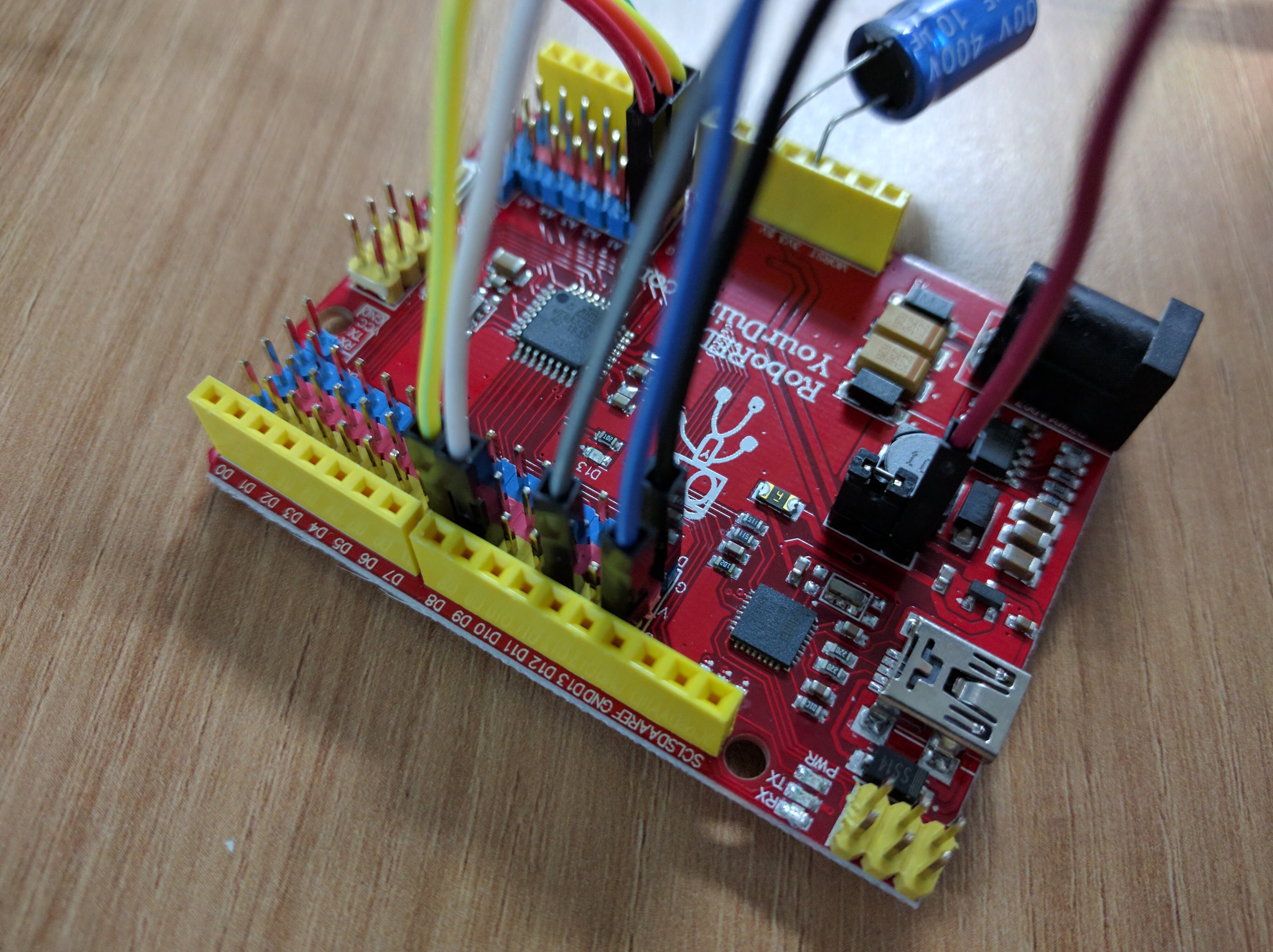
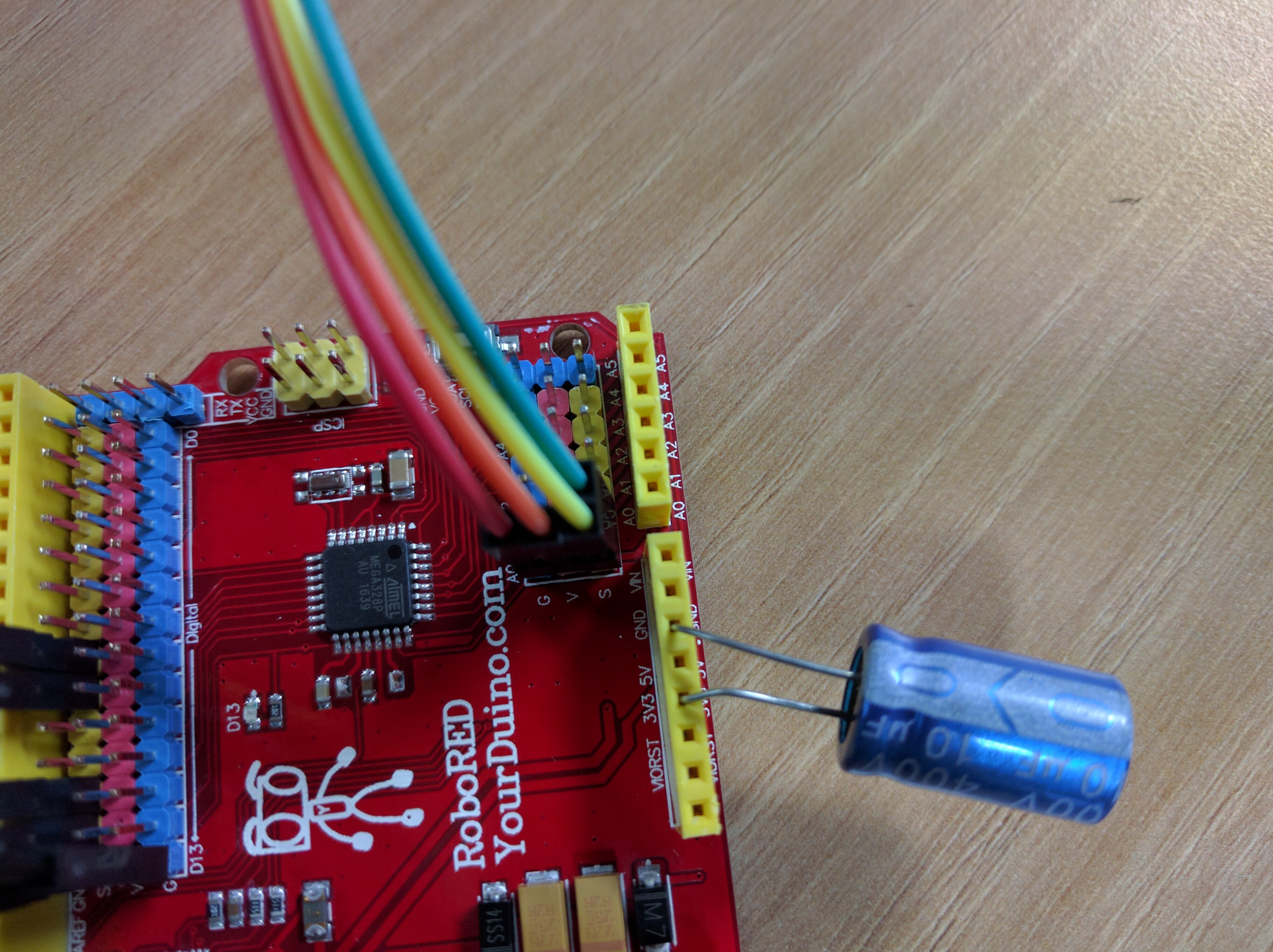
Add the Capacitor
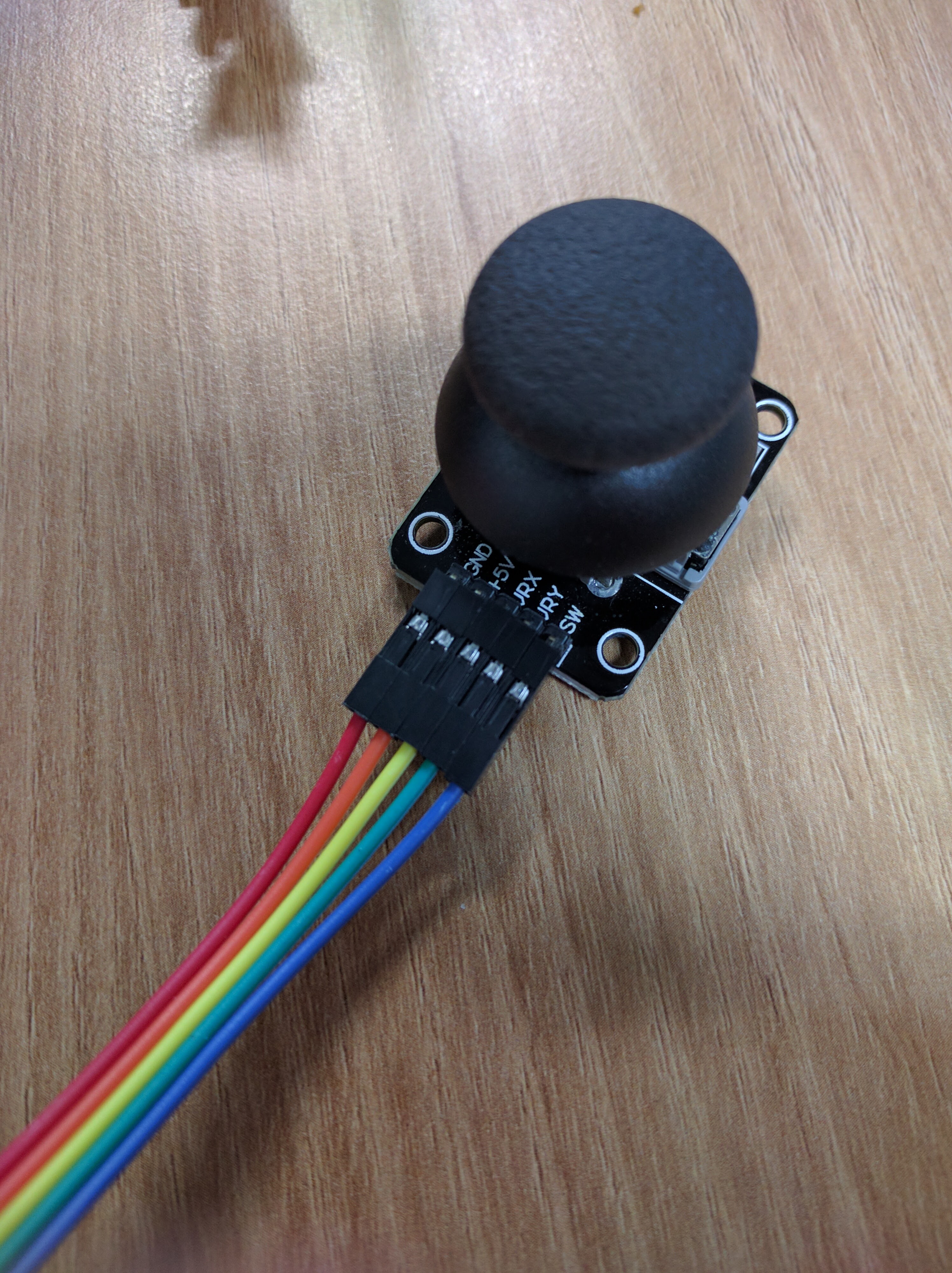
Add the joystick
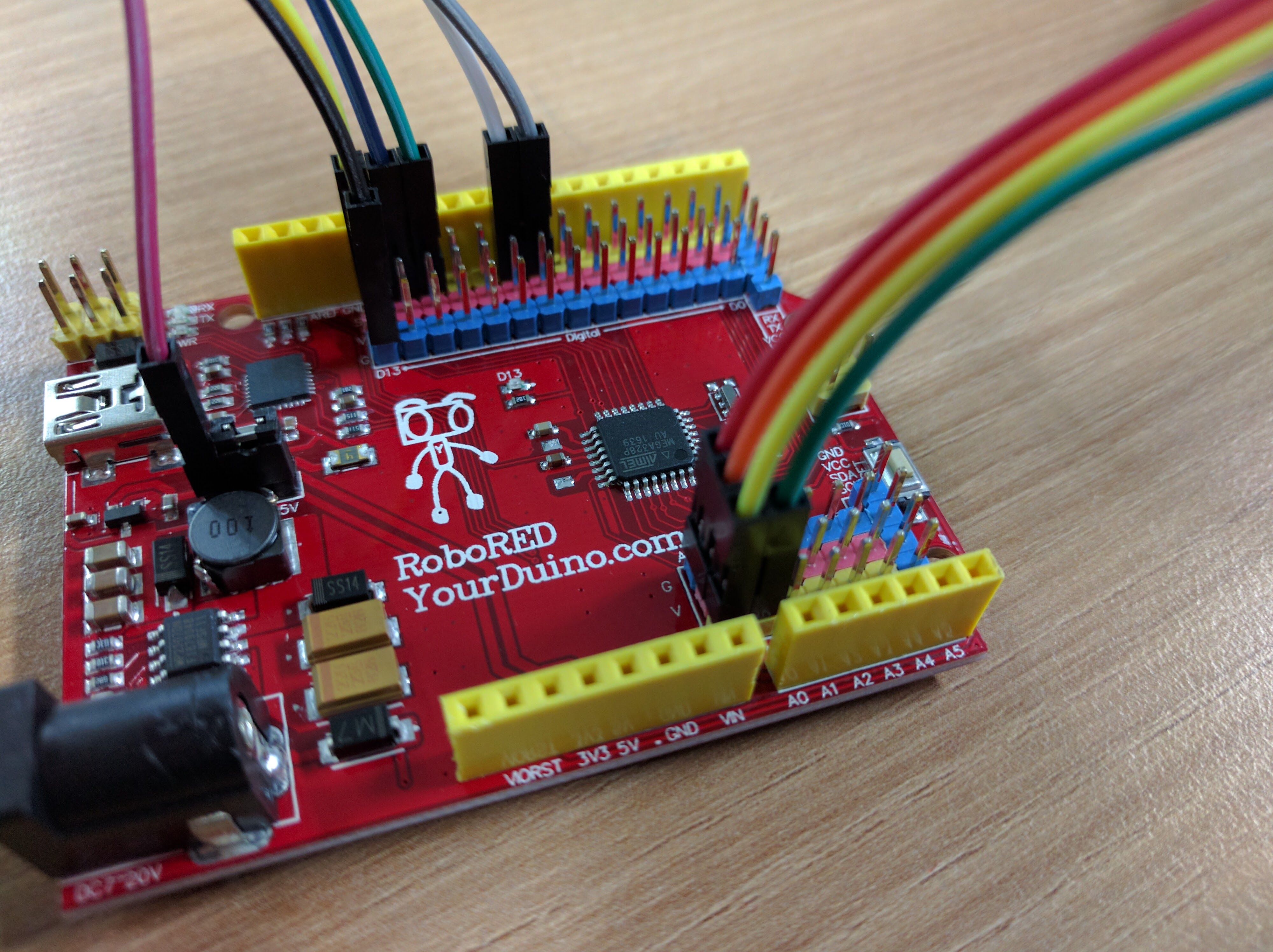
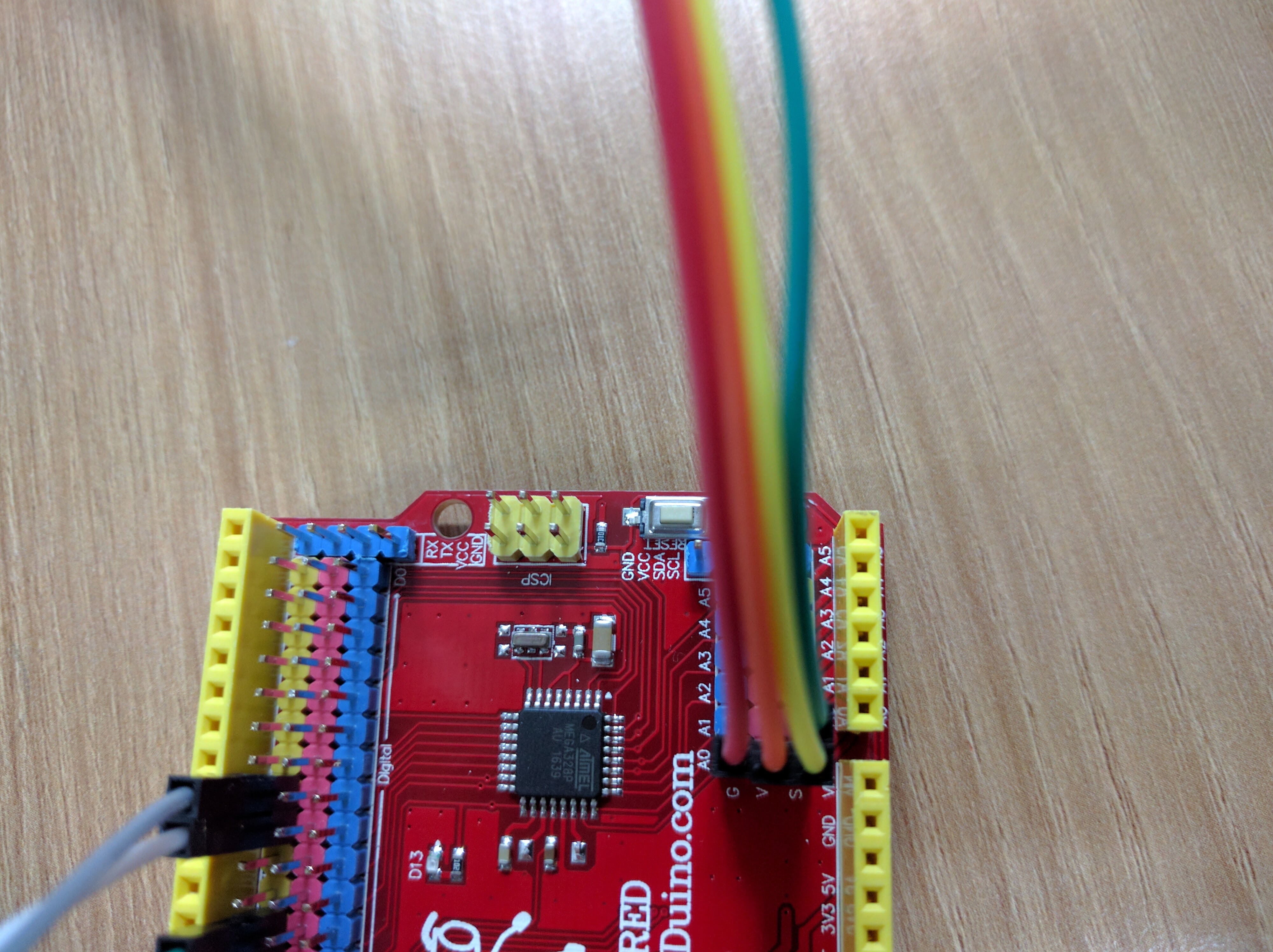
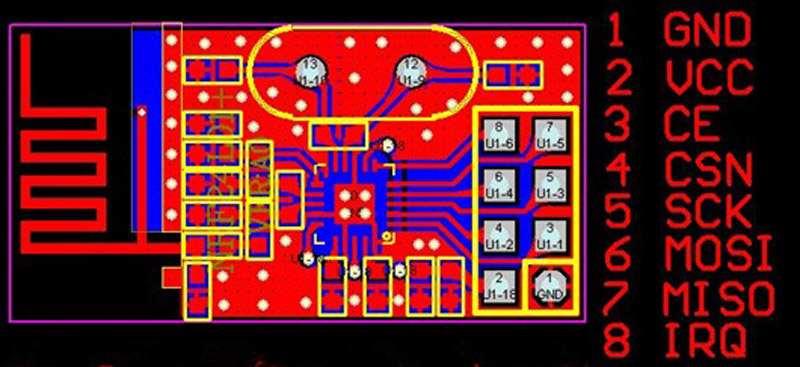
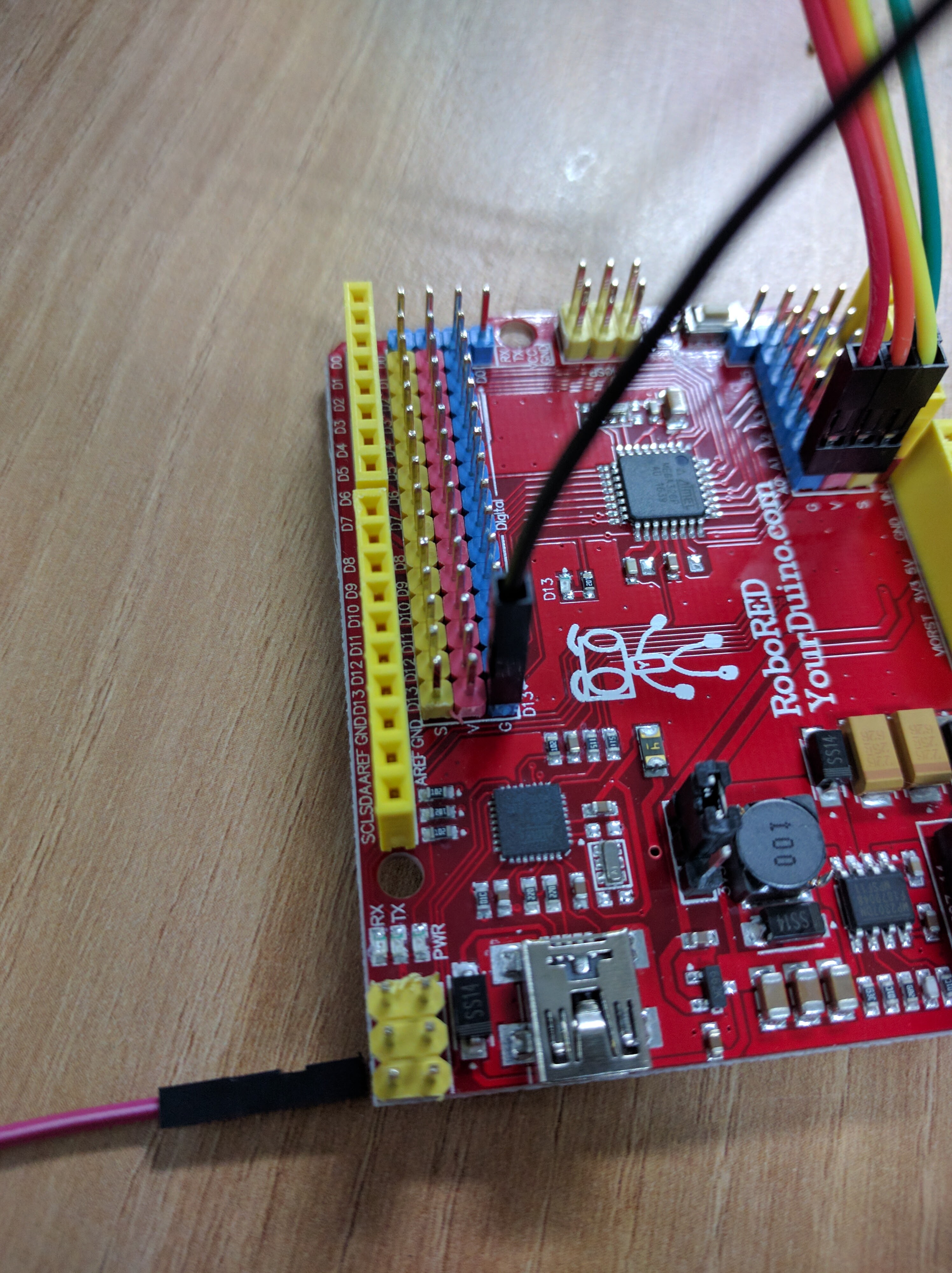
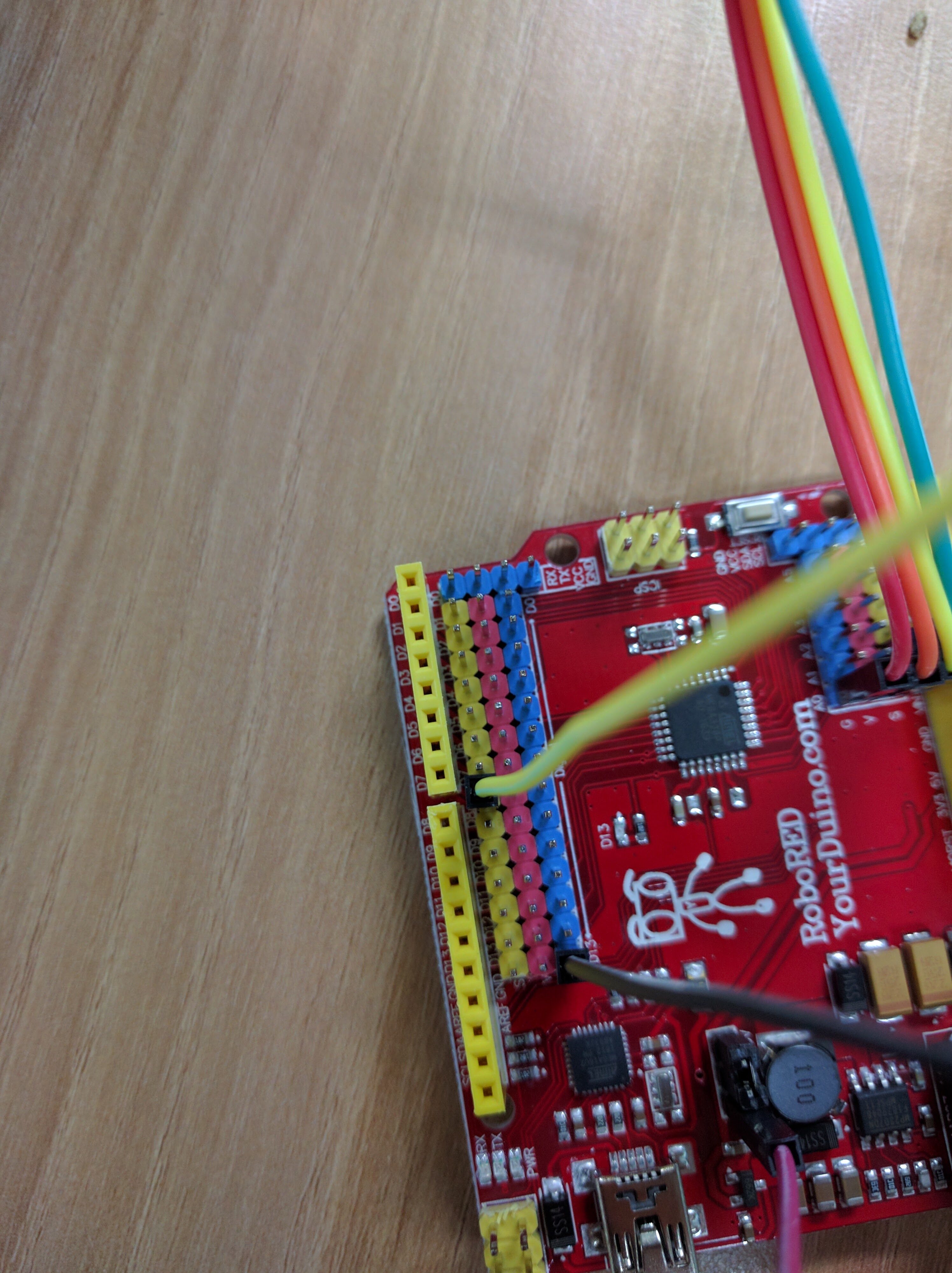
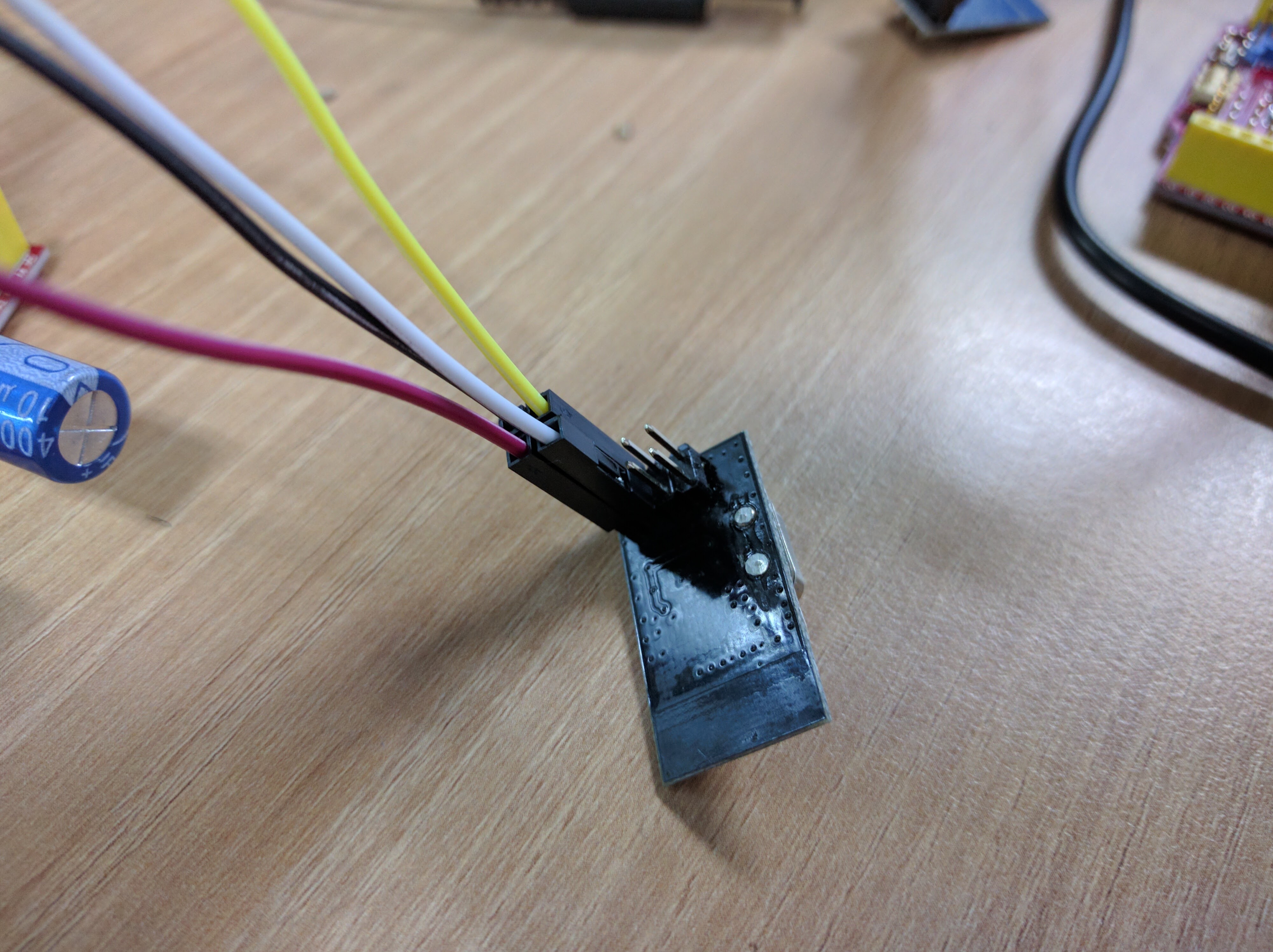
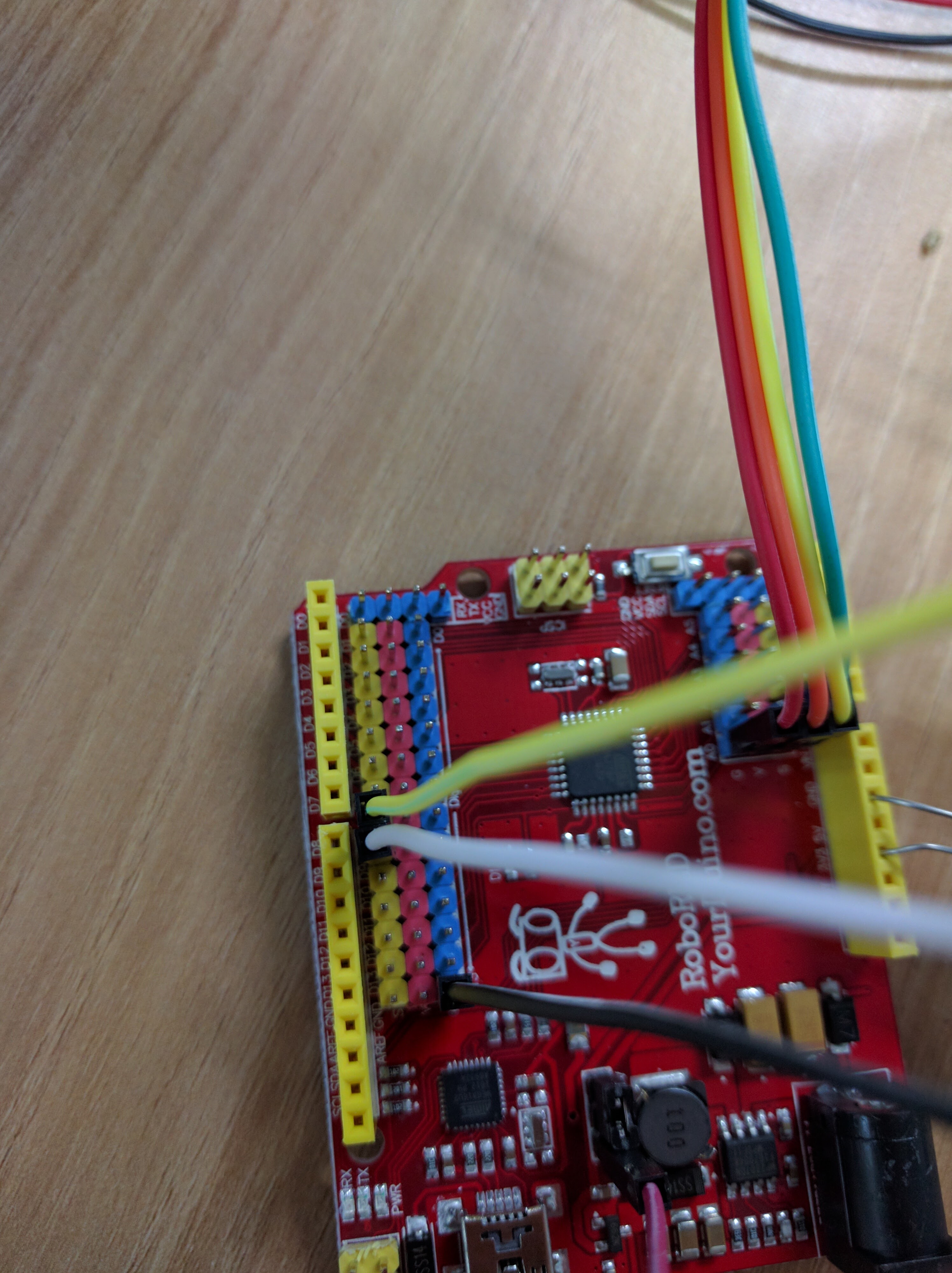
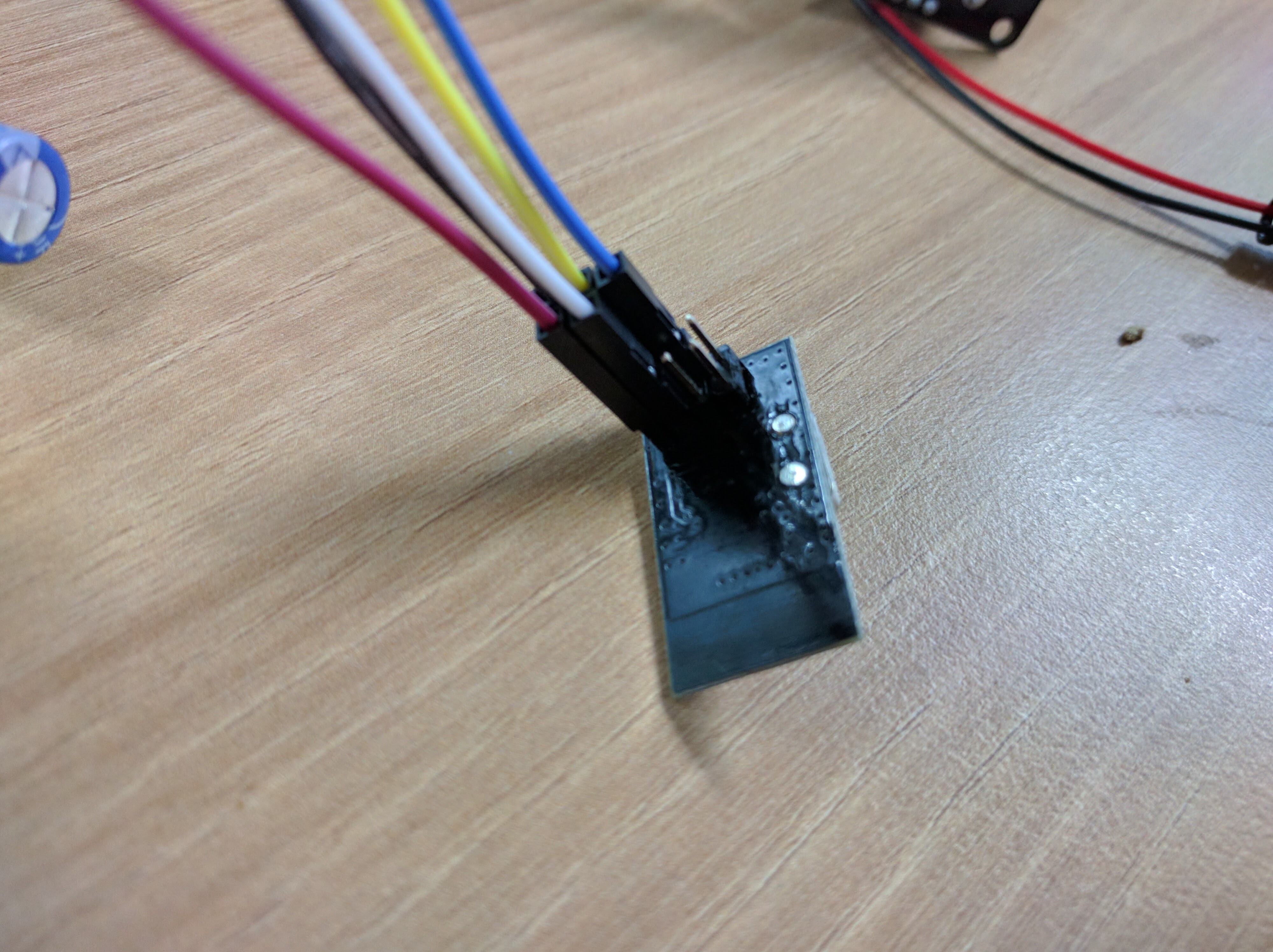
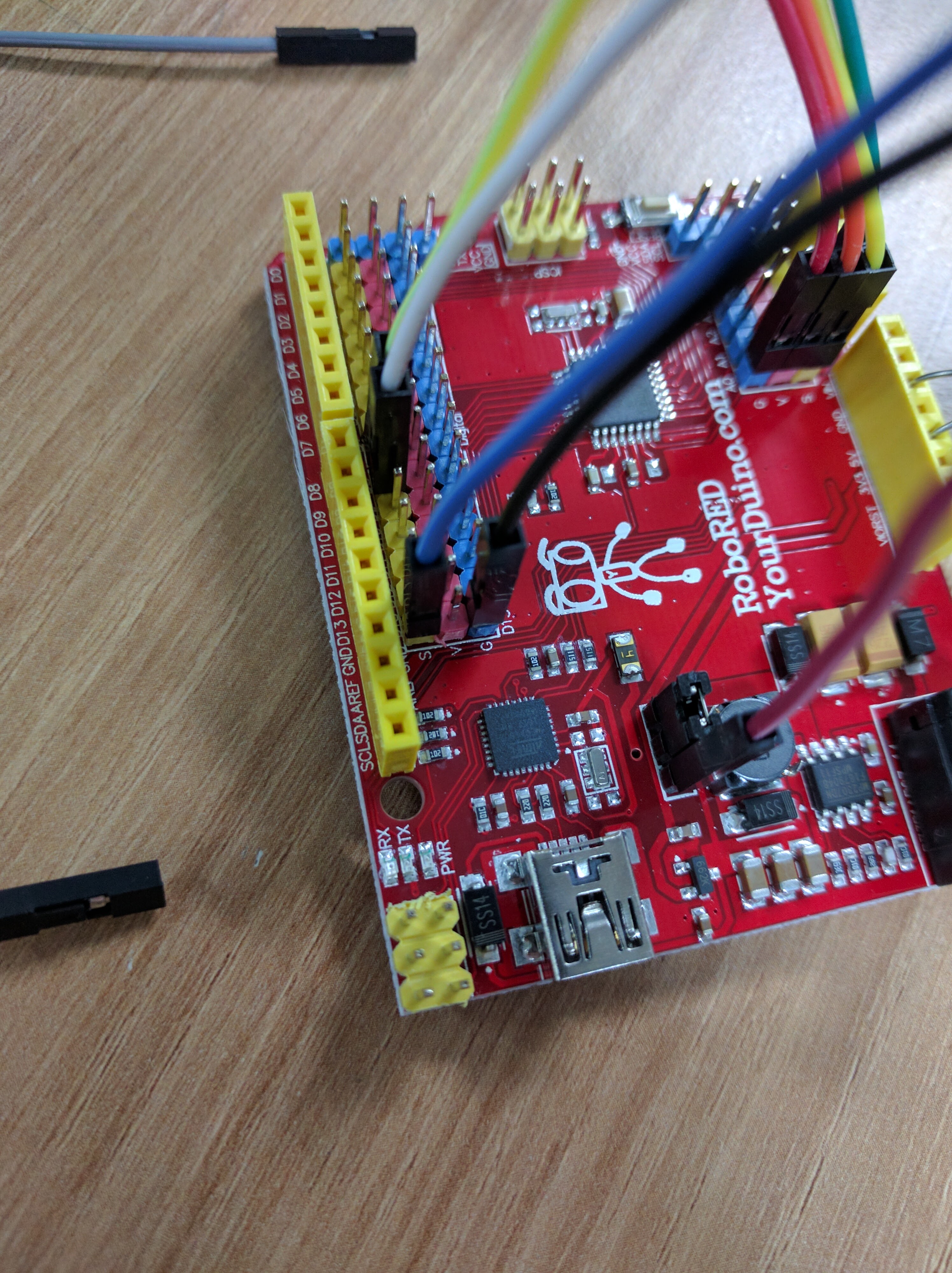
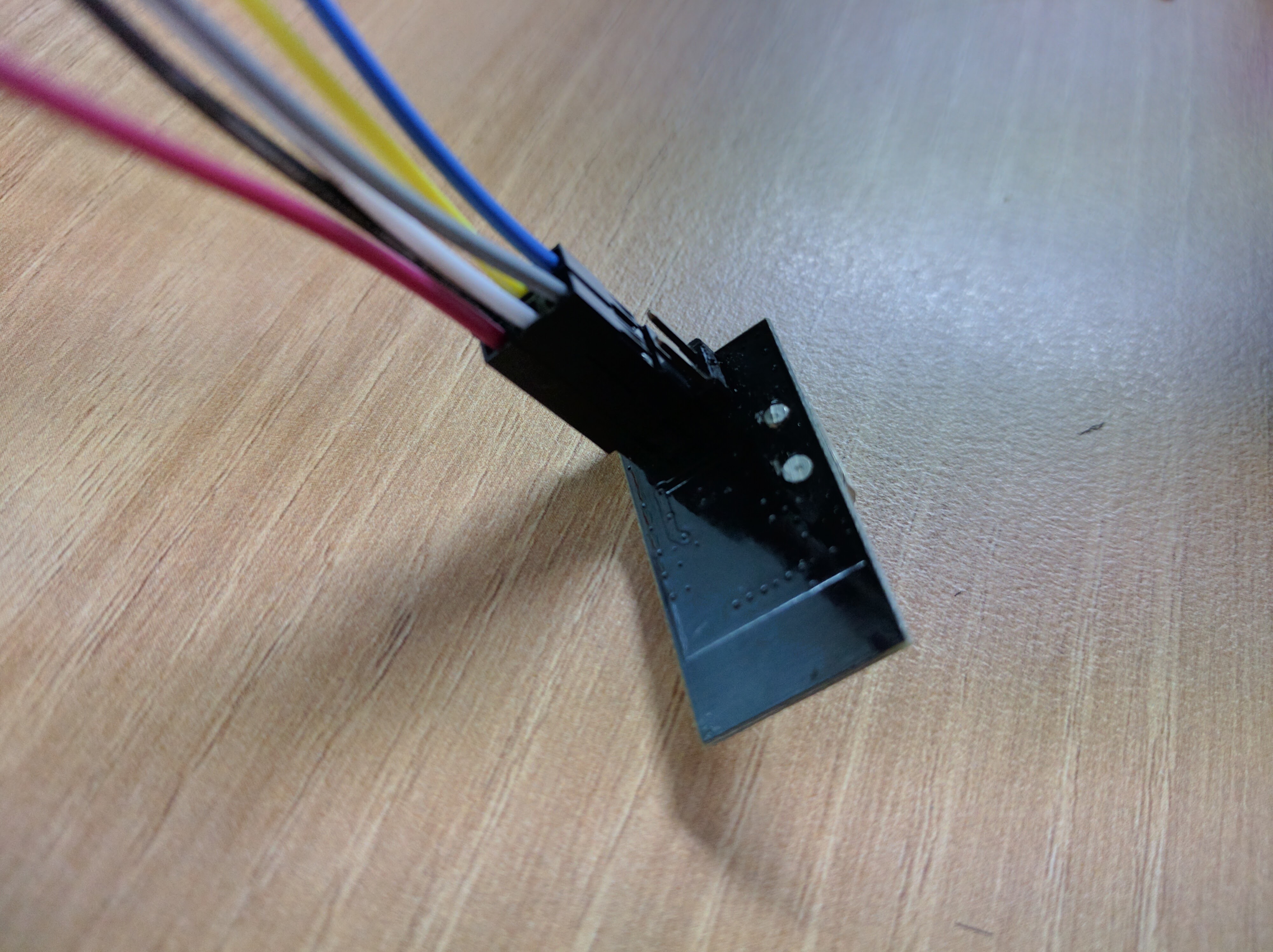
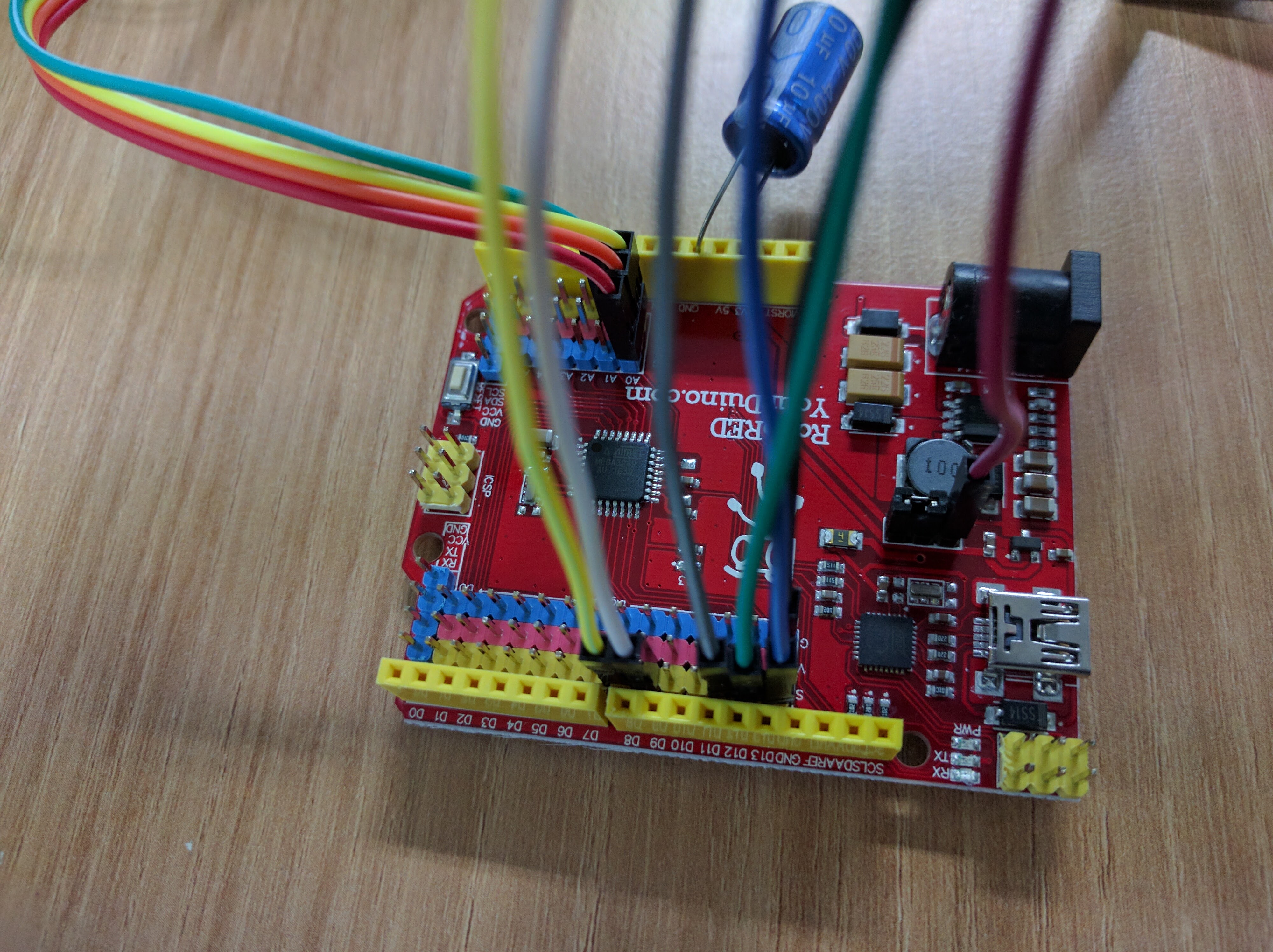
Add RF Module
| RF Chip Pin Name | RF Chip Pin Number | Arduino Pin |
|---|---|---|
| GND | 1 | GND |
| VCC | 2 | 3.3V |
| CE | 3 | 7 |
| CSN | 4 | 8 |
| SCK | 5 | 13 |
| MOSI | 6 | 11 |
| MISO | 7 | 12 |
| IRQ | 8 |


Add Servo
Code
Controller
Upload the following code to your remote controller:
// Code for controller
#include <RF24Network.h>
#include <RF24.h>
#include <SPI.h>
RF24 radio(7,8); // nRF24L01(+) radio attached using Getting Started board
RF24Network network(radio); // Network uses that radio
const int xAxis = A0; // joystick X axis
const int yAxis = A1; // joystick Y axis
int range = 100; // output range of X or Y movement
int center = range / 2; // resting position value
int threshold = range / 4; // resting threshold
const uint16_t this_node = 01; // Address of our node in Octal format
const uint16_t other_node = 00; // Address of the other node in Octal format
const unsigned long interval = 20; //ms // How often to send 'hello world to the other unit
unsigned long last_sent; // When did we last send?
unsigned long packets_sent; // How many have we sent already
struct payload_t { // Structure of our payload
int x_axis_value;
int y_axis_value;
bool buttonIsPressed;
};
void setup(void)
{
Serial.begin(57600);
Serial.println("RF24Network/examples/helloworld_tx/");
SPI.begin();
radio.begin();
network.begin(/*channel*/ 90, /*node address*/ this_node);
pinMode(0, INPUT);
}
void loop() {
network.update(); // Check the network regularly
unsigned long now = millis(); // If it's time to send a message, send it!
if ( now - last_sent >= interval )
{
last_sent = now;
Serial.print("Sending...");
bool buttonState = digitalRead(0);
payload_t payload = { readAxis(xAxis), readAxis(yAxis) , buttonState};
RF24NetworkHeader header(/*to node*/ other_node);
bool ok = network.write(header,&payload,sizeof(payload));
if (ok)
Serial.println("ok.");
else
Serial.println("failed.");
}
}
/*
reads an axis (0 or 1 for x or y) and scales the
analog input range to a range from 0 to <range>
*/
int readAxis(int thisAxis) {
// read the analog input:
int reading = analogRead(thisAxis);
// map the reading from the analog input range to the output range:
reading = map(reading, 0, 1023, 0, range);
// if the output reading is outside from the
// rest position threshold, use it:
int distance = reading - center;
if (abs(distance) < threshold) {
distance = 0;
}
// return the distance for this axis:
return distance;
}
Code for Robot:
Upload the following code to the Robot.
// Code for Robot
#include <RF24Network.h>
#include <RF24.h>
#include <SPI.h>
#include <Servo.h> //KKKKKKKKKKKKK
#define leftMotorA 2
#define leftMotorB 3
#define leftMotorEnable 9
#define rightMotorA 4
#define rightMotorB 5
#define rightMotorEnable 10
Servo myservo; // create servo object to control a servo KKKKKKKKKKKKK
RF24 radio(7,8); // nRF24L01(+) radio attached using Getting Started board
RF24Network network(radio); // Network uses that radio
const uint16_t this_node = 00; // Address of our node in Octal format ( 04,031, etc)
const uint16_t other_node = 01; // Address of the other node in Octal format
struct payload_t { // Structure of our payload
int x_axis_value;
int y_axis_value;
bool buttonIsPressed;
};
void stop() {
digitalWrite(rightMotorEnable, LOW);
digitalWrite(leftMotorEnable, LOW);
}
void leftWheel() {
digitalWrite(rightMotorA, HIGH);
digitalWrite(rightMotorB, LOW);
digitalWrite(rightMotorEnable, HIGH);
digitalWrite(leftMotorA, LOW);
digitalWrite(leftMotorB, HIGH);
digitalWrite(leftMotorEnable, HIGH);
}
void rightWheel() {
digitalWrite(rightMotorA, LOW);
digitalWrite(rightMotorB, HIGH);
digitalWrite(rightMotorEnable, HIGH);
digitalWrite(leftMotorA, HIGH);
digitalWrite(leftMotorB, LOW);
digitalWrite(leftMotorEnable, HIGH);
}
void forward() {
digitalWrite(leftMotorA, HIGH);
digitalWrite(leftMotorB, LOW);
digitalWrite(leftMotorEnable, HIGH);
digitalWrite(rightMotorA, HIGH);
digitalWrite(rightMotorB, LOW);
digitalWrite(rightMotorEnable, HIGH);
}
void backward() {
digitalWrite(leftMotorA, LOW);
digitalWrite(leftMotorB, HIGH);
digitalWrite(leftMotorEnable, HIGH);
digitalWrite(rightMotorA, LOW);
digitalWrite(rightMotorB, HIGH);
digitalWrite(rightMotorEnable, HIGH);
}
void setup(void)
{
Serial.begin(57600);
Serial.println("RF24Network/examples/helloworld_rx/");
SPI.begin();
radio.begin();
network.begin(/*channel*/ 90, /*node address*/ this_node);
pinMode(leftMotorA, OUTPUT);
pinMode(leftMotorB, OUTPUT);
pinMode(rightMotorA, OUTPUT);
pinMode(rightMotorB, OUTPUT);
stop();
myservo.attach(6); // KKKKKKKKKKKKKKK
}
void loop(void){
network.update(); // Check the network regularly
while ( network.available() ) { // Is there anything ready for us?
RF24NetworkHeader header; // If so, grab it and print it out
payload_t payload;
network.read(header,&payload,sizeof(payload));
Serial.print("Received packet");
Serial.print(payload.x_axis_value);
if (payload.x_axis_value > 10) {
forward();
} else if (payload.x_axis_value < -10) {
backward();
}
else if (payload.y_axis_value > 10) {
leftWheel();
} else if (payload.y_axis_value < -10) {
rightWheel();
} else {
stop();
}
if (payload.buttonIsPressed == true) {
myservo.write(180); // KKKKKKKKKKKKKKKK
} else {
myservo.write(0);
}
}
}